2A.1 Vector diagram
If consideration is given to a current transformer which is assumed to contain only linear electric and magnetic components in itself and in its burden, then, under the further assumption of sinusoidal primary current, all the currents, voltages and magnetic fluxes will be sinusoidal, and the performance can be illustrated by a vector diagram as shown in Figure 2A.1.
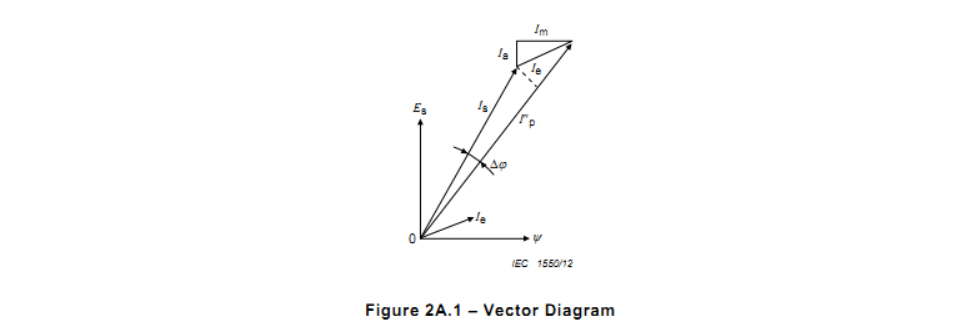
In Figure 2A.1, Is represents the secondary current. It flows through the impedance of the secondary winding and the burden which determines the magnitude and direction of the necessary induced e.m.f. Es and of the secondary linked flux which is perpendicular to the e.m.f. vector. This flux is maintained by the exciting current Ie, having a magnetizing component Im parallel to the secondary linked flux, and a loss (or active) component Ia parallel to the e.m.f.. The vector sum of the secondary current Is and the exciting current Ie is the vector I"p representing the primary current multiplied by the actual turns ratio (number of primary turns to number of secondary turns).
Thus, for a current transformer with the inverse of the actual turns ratio equal to the rated transformation ratio, the difference in the lengths of the vectors Is and I"p, related to the length of I"p, is the ratio error according to the definition of 3.4.3, and the angular difference is the phase displacement according to 3.4.4.
2A.2 Turns correction
When the inverse of the actual turns ratio is different from (usually less than) the rated transformation ratio, the current transformer is said to have turns correction. Thus, in evaluating performance, it is necessary to distinguish between I"p, the primary current multiplied by the actual turns ratio, and I'p, the primary current divided by the rated transformation ratio. Absence of turns correction means I'p = I"p. If turns correction is present, I'p is different from I"p, and since I"p is used in the vector diagram and I'p is used for the determination of the ratio error, it can be seen that turns correction has an influence on the ratio error and may be used deliberately for that purpose). However, the vectors I'p and I"p have the same direction, so turns correction has no influence on phase displacement.
It will also be apparent that the influence of turns correction on composite error is less than its influence on ratio error.
2A.3 The error triangle
In Figure 2A.2, the upper part of Figure 2A.1 is re-drawn to a larger scale and under the further assumption that the phase displacement is so small that for practical purposes the two vectors Is and I"p can be considered to be parallel. Assuming again that there is no turns correction, it will be seen by projecting Ie to Ip that to a good approximation the in-phase component of Ie can be used instead of the arithmetic difference between I"p and Is to obtain the ratio error. Similarly, the quadrature component of Ie can be used to express the phase displacement.
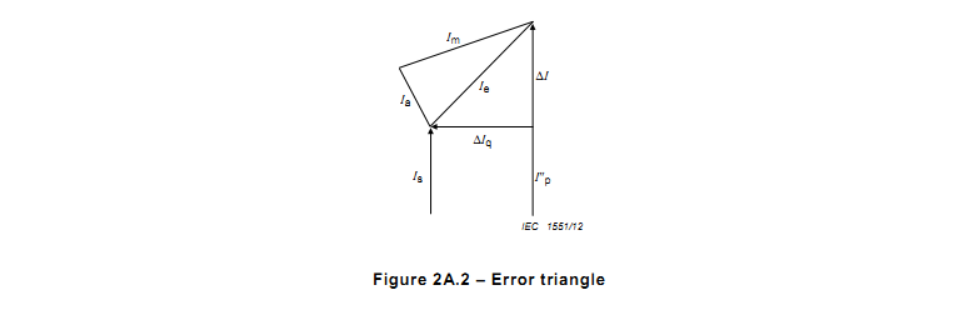
It can further be seen that under the given assumptions the exciting current Ie divided by I"p is equal to the composite error according to 3.4.203.
Thus, for a current transformer without turns correction and under conditions where a vector representation is justifiable, the ratio error, phase displacement and composite error form a right-angled triangle.
In this triangle, the hypotenuse representing the composite error is dependent on the magnitude of the total burden impedance consisting of burden and secondary winding, while the division between ratio error and phase displacement depends on the power factors of the total burden impedance and of the exciting current. Zero phase displacement will result when these two power factors are equal, i.e. when Is and Ie are in phase.
2A.4 Composite error
The most important application, however, of the concept of composite error is under conditions where a vector representation cannot be justified because non-linear conditions introduce higher harmonics in the exciting current and in the secondary current (see Figure 2A.3).
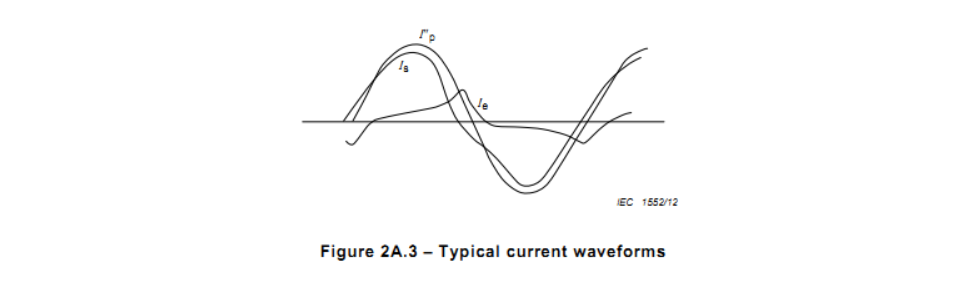
It is for this reason that the composite error is defined as in 3.4.203 and not in the far simpler way as the vector sum of ratio error and phase displacement as shown in Figure 2A.2.
Thus, in the general case, the composite error also represents the deviations from the ideal current transformer that are caused by the presence in the secondary winding of higher harmonics which do not exist in the primary. (The primary current is always considered sinusoidal for the purposes of this standard.)




